自适应巡航有什么弊端,自适应巡航系统和定速巡航有什么区别?
自适应巡航系统和定速巡航有什么区别?
简单点来讲就是自适应巡航会根据车辆的周围环境自动改变巡航速度,普通的定速巡航就是前面有堵墙你不踩刹车它也会按照你设定的速度撞上去!
车子什么是自适应巡航
自适应巡航也可称为主动巡航,是一种智能化的自动控制系统,系统包括雷达传感器、数字信号处理器和控制模块。
司机设定所希望的车速,系统利用低功率雷达或红外线光束探测前方200m左右的距离,得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速使车辆和前车保持一个安全的行驶距离。
当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。
主动巡航控制系统代替司机控制车速,避免了频繁的取消和设定巡航控制,使巡航系统适合于更多的路况,而驾驶人员完全可以将脚从踏板上移开,只要关注于方向盘即可,能大幅降低长途驾驶所带来的疲劳,为驾驶者提供了一种更轻松的驾驶方式。
目前出现在国内的自适应系统只能“自适应刹车”,还有很大的发展空间。

扩展资料:
特点:
自适应巡航控制系统的最大优点在于不仅能够保持驾驶人预先设定的车速,还能够在特定驾驶条件下随时根据需要降低车速,甚至自动制动。
当车速超过30公里/小时,无论驾驶人正以何种方式驾驶车辆,自适应巡航控制系统均会介入工作,以使车辆始终保持驾驶人预先设定的车速。为此,系统要么自动提高发动机动力,要么降低发动机动力并使变速器降档,以利用发动机制动降低车速。
在某些情况下(例如下坡行驶或拖车时),如果上述措施不足以使车速降低到预定值,系统还将使制动系统进行干预。
参考资料:自适应巡航----百度百科
定速巡航和自适应巡航有什么区别
简单点来讲就是自适应巡航,会根据车辆的周围环境自动改变巡航速度,普通的定速巡航就是前面有堵墙,不踩刹车它也会按照你设定的速度撞上去。
前者可以自动加减速度,利用前面的探头探知与前车的距离自动刹车或者加速;后者只能人为设定速度,不能自动。
长安CS55的集成式自适应巡航系统是什么?
IACC可辅助驾驶员控制车辆以预先设定的巡航速度或跟车时距在车道内行驶。
IACC利用自适应巡航控制系统使用的雷达、车道偏离预警系统使用的摄像头探测前方车辆、车道线,通过控制车速,保持车辆以设定的巡航速度行驶或与前车保持预先设定的跟车时距行驶,同时通过控制转向实现车辆在车道内行驶。
任何时候,驾驶员都拥有对车辆的优先控制权。
以下情况下,驾驶员需及时识别危险并通过踩下制动踏板、按下取消按键、接管方向盘控制等方式取消IACC并控制车辆,保证行车安全:
●本车与前方、相邻车道车辆未保持足够的安全距离
●辅助转向不足以安全通过弯道
●车辆处于IACC工作受限工况等情形时
特别要注意的是:
使用IACC时,驾驶员双手须紧握方向盘,时刻观察本车前方、后方及周边路况信息。
即使正在使用IACC,驾驶员始终承担着安全且合法地控制车辆,保持正确车距和车速的最终责任。
IACC不适合在城市道路或崎岖曲折的道路(如山路、匝道等)或湿滑路面上使用。
IACC不适合在天气恶劣/视线不佳/道路湿滑、颠簸、曲折、拥堵、交叉路口等情况时使用(如雨/雪/雾/沙尘/光照不足/反光/逆光/炫目/进出隧道/林荫道路/横风路段/施工路段/弯道半径过小道路/进出收费站,以及路面积水/雪/结冰或有油污、沙尘等道路),此类用途会导致系统无法按您预期辅助驾驶车辆或直接退出,甚至产生与该系统未探测到的周围障碍物相碰的风险。
使用IACC前请详细阅读并熟知自适应巡航系统、车道偏离预警系统相关受限工况。
雷达和摄像头在以下(不限于)情况可能无法准确探测车道线、前方车辆,从而无法辅助您控制车辆按期望轨迹行驶或调整车速、车距,请及时接管对车辆的控制,必要时关闭IACC。
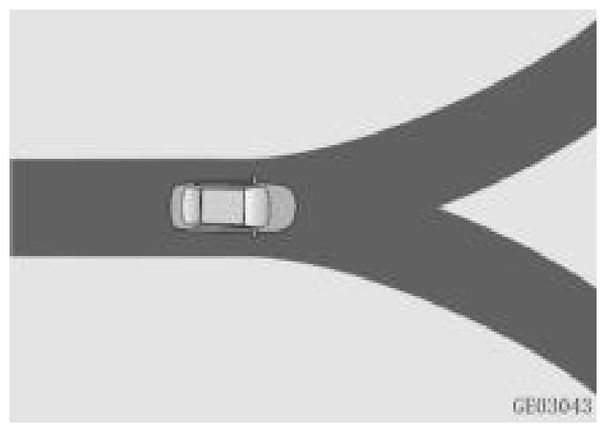
1.行驶路线不唯一
前方岔路或车道数量变化时,系统无法判断行驶方向,可能选择错误车道或直接退出。
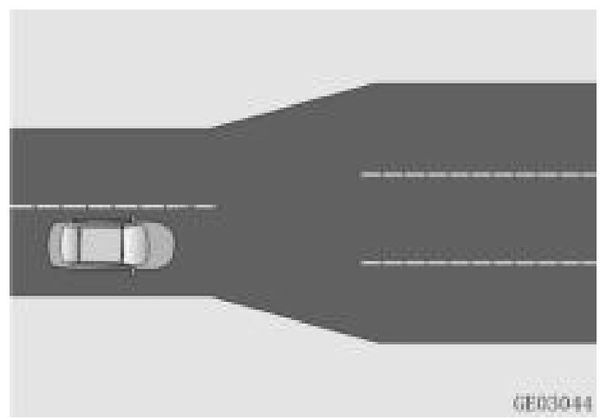
2.道路“封闭”
道路施工或前方存在故障车辆等情况下道路通行路线非车道线或前方无道路,系统无法自动识别并变换车道。

3.车道可行驶空间被侵占
系统无法识别侵入车道内且悬空的异物,可能存在碰撞风险(如中央隔离带内的植物侵入车道内等)。
系统可能无法识别前方静止的车辆,特别是本车车速过高或与前车存在一定夹角时,可能存在碰撞风险。
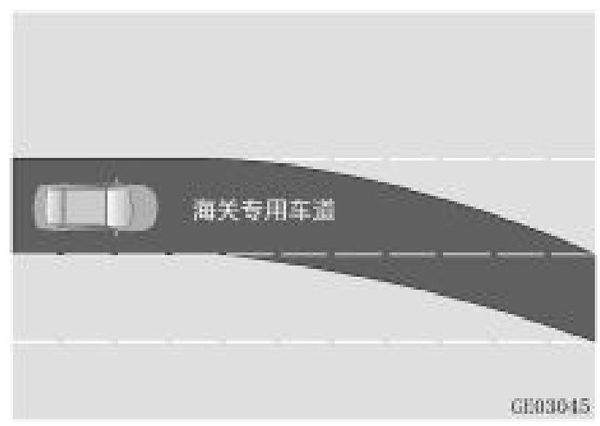
4.车道线不标准
车道线不清晰(破旧、缺失、路面反光、明暗度连续变化、车道线在树荫或隔离带荫影内等)、凌乱(如交叉路口,分流、汇流、匝道口等处多组标线等)情况下,系统无法预测行驶轨迹,可能出现非预期的错误转向,甚至直接退出。
5.路面凹凸不平
车轮压过路面上的凹坑、石块等凸起物时,受路面干扰,车辆航向可能瞬间产生较大变化,车辆可能偏离车道。系统可能因为车辆颠簸导致识别不到车道线而临时退出。
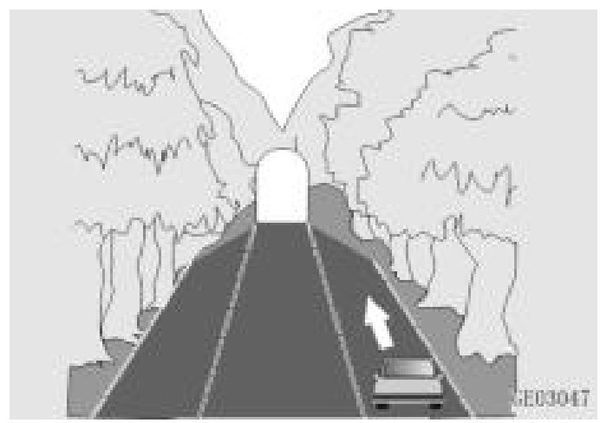
6.系统可能将路沿(特别是在隧道内)、车轮印迹、路面缝隙、积雪等类似车道线特征的线条误识别为车道线,车辆将偏离车道中间行驶或航向出现短暂变化。
7.车辆在进入弯道、通过连续弯道,或者在转弯半径过小的弯道内、湿滑路面上行驶,以及超速行驶时,系统可能无法辅助驾驶员将车辆控制在车道内,甚至可能直接退出。
8.拥堵或合流道路
系统可能无法对近距离切入车辆做出反应,特别是在拥堵道路处于引导车控制模式时,存在碰撞风险。
引导车控制模式下,引导车换道时,本车将跟随引导车行驶,可能与临道车辆发生碰撞风险。
引导车控制模式下,可能基于靠近车道边缘的目标车辆进行控制,车辆可能偏向车道一侧转向,与临道车辆存在碰撞风险。
9.强磁环境将干扰电动助力转向系统(EPS)的响应,切勿将具有强磁特性的物件靠近EPS。车辆长时间处于强磁环境内时(如电厂等有高压电磁辐射的场所),请留意车辆EPS转向辅助性能,存在异常时请勿使用IACC,并立即前往长安汽车授权服务网点进行检修。
10.牵引其他车辆时请勿使用IACC。任何影响自适应巡航系统雷达、车道偏离预警系统摄像头的功能、性能的场景,均勿使用IACC。